歡迎進入東莞市諾元電機設備有限公司官網!公司主營:無刷繞線機,電機繞線機,馬達繞線機,定子繞線機,飛叉繞線機,高速繞線機等!
諾元視頻號


0769-81551289
150-1531-7403(微信同號)
諾元視頻號
0769-81551289
150-1531-7403(微信同號)
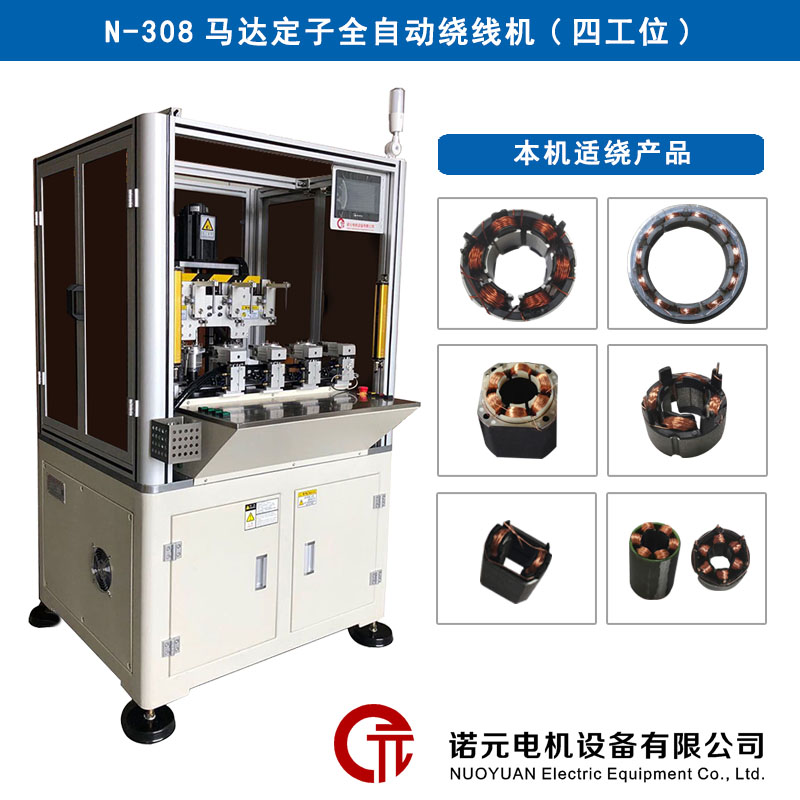
植保無人機馬達定子繞線機的繞線排線方式及精密度要求,需結合其高功率、高效率、輕量化及復雜工況需求,從繞線方式、排線方式、精密度指標及實現措施四方面綜合分析,下面諾元簡單給大家講解一下吧!
一、繞線方式選擇
植保無人機馬達定子通常采用針式內繞或飛叉外繞,具體取決于定子槽口方向:
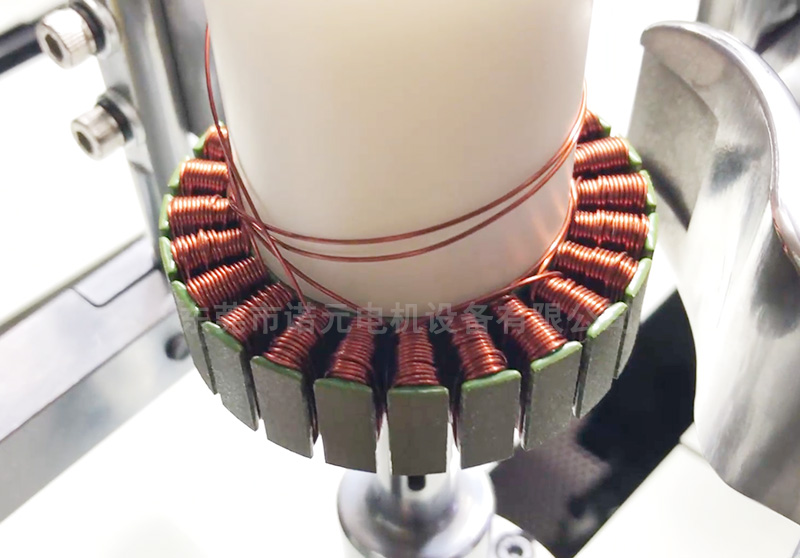
針式內繞
適用場景:槽口向內的定子(如無刷電機、內轉子電機),常見于植保無人機高效能馬達。
工作原理:伺服電機驅動針桿高速上下運動,線嘴同步移動,模具左右平移,實現線圈繞入槽口。
優勢:排線精度高,可適應復雜槽型(如梯形、矩形),針桿速度達800-1200r/min,適合高準度需求;線材排列緊密,減少線圈電阻波動,提升電機效率。
飛叉外繞
適用場景:槽口向外的定子(如部分有刷電機、外轉子電機),適用于植保無人機型號。
工作原理:飛叉高速旋轉帶動線嘴運動,線嘴牽引漆包線卡入定子槽口,實現精密排線。
優勢:經濟高效,飛叉速度可達2600-5000r/min,繞線效率高;適合大批量生產,但排線精度略低于針式內繞。
二、排線方式優化
排線方式直接影響磁場分布均勻性及電機性能,需根據定子槽型選擇:
平行排線
特點:導線平行排列,磁場分布均勻,減少振動和噪音。
要求:需高準度導軌和張力控制,定位誤差≤±0.05mm,避免線材交叉或重疊。
螺旋排線
特點:導線螺旋纏繞,空間利用率高,線圈緊密。
要求:需高速繞線能力(主軸轉速≥5000r/min)和緊湊結構設計,防止線材因離心力甩出。
交叉排線
特點:導線交叉排列,磁場均勻性更優,適合高精度電機。
要求:需復雜排線控制算法和張力補償裝置,實時調整線材張力,避免斷線或松散。
三、精密度核心要求
植保無人機馬達定子繞線排線的精密度需滿足以下多維指標:
線圈匝數誤差:嚴格控制在±1匝以內,避免因匝數偏差導致電機性能不穩定。
線徑偏差:要求線徑誤差≤±0.01mm,確保線材與定子槽型的匹配性,防止因線徑過粗導致傷線或過細引發斷線。
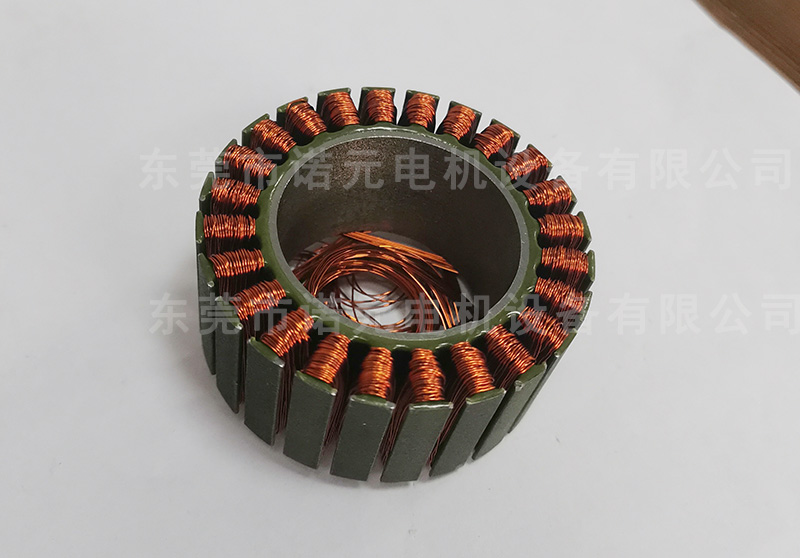
排線整齊度:線材排列需緊密無交叉,層間間隙誤差≤±0.05mm,減少線圈電阻波動和電磁干擾,提升電機效率。
槽口參數適配:槽口寬度需根據線徑和并繞股數動態調整(如0.3mm以下線徑可30根并繞),避免刮線或排線臃腫。
疊厚控制精度:定子疊厚誤差≤±0.1mm,防止因疊厚偏差導致繞線弧度變化,引發傷線或排線不均。
外徑與高度適配:外徑誤差≤±0.2mm,高度誤差≤±0.5mm,確保繞線機工位與定子尺寸匹配,減少機械干涉。
工位間定位誤差:多工位設備(如四工位、六工位)各工位間定位誤差≤±0.05mm,避免因工位偏差導致線圈形狀不一致。
速度同步性:各工位繞線速度需保持同步,誤差≤±2%,防止因速度差異引發線材張力波動,導致斷線或松散。
四、精密度實現措施
硬件配置升級
采用高準度伺服電機(額定轉速≥3000RPM)搭配總線式PLC運動控制器,實現繞線軌跡、角度和速度的準確編程控制。
配備閉環張力控制系統,結合張力傳感器實時監測線材張力,拉力波動范圍控制在±5%以內。
針對不同定子型號設計專用繞線模具,模具定位精度≤±0.02mm,確保線圈形狀與尺寸符合要求。
排線算法優化
基于定子槽型建立準確的三維數學模型,采用專業算法生成平滑的排線路徑,減少線材彎曲應力。
在路徑拐角處提前減速,避免線材因離心力過大而甩出或疊線;集成振動抑制算法,降低共振對速度穩定性的影響。
環境與工藝控制
在溫度控制在20±2℃、濕度控制在50±5%的車間內作業,防止漆包線絕緣層軟化。
安裝減震墊、隔音罩等設備,降低振動和噪音干擾。
實時監測與故障預防
部署機器視覺檢測系統,實時監測線材排列狀態,缺陷檢測準確率高達99.5%以上。
集成多源傳感器,通過機器學習預測設備故障。
植保無人機馬達定子繞線機如何繞線排線?精密度有何要求?以上已經做了簡單的講解,希望這些知識可以幫助到大家!





 掃描二維碼,關注諾元公眾號
掃描二維碼,關注諾元公眾號